The design, manufacture and optimisation of rovers for an analogue sample return mission to Mars for the UKSEDS Olympus Rover Trials
Group Members
Richard Abrams, James Brown, Ivalin Chobanov, Mike Godfrey, Lian Ming Goh, Ethan Goldsmith Lister, Duncan Hamill, Saxon Williams Harries, Hazel Mitchell, Francesco Pignone, Yaseen Reza
Supporters
UKSEDS
“The Olympus Rover Trials (ORT) challenge student teams to design, construct and operate a rover for an analogue sample return mission to Mars. Students create a rover concept, trade off performance parameters and pass through a rigorous review process with panels of engineers from the space sector.” ~UKSEDS
Southampton University Spaceflight Society (SUSF) have competed in the ORT twice so far, producing two rovers: Heracles 2019 and Phobos 2020.
The 2019 competition involved scaling simulated Martian terrain, collecting sample canisters and enduring the same vibration testing experienced by real satellites. We claimed 4th Place and the Best Outreach award, the highest of any non-returning team.
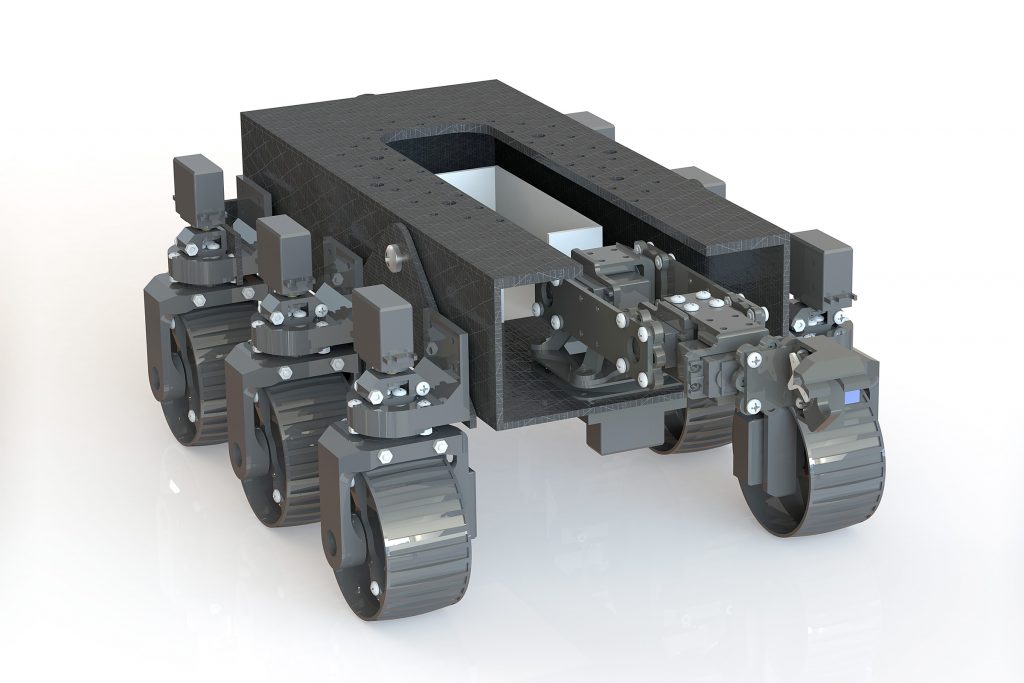
This year, we designed and prototyped an improved rover, with a carbon fiber reinforced polymer (CFRP) chassis and sturdier gimbal and arm assemblies. Unfortunately, the competition was moved online after university facilities closed but we successfully completed a functioning prototype with a wooden chassis and continue working towards the new “Mission Planning” requirements.
Both rovers feature rocking legs and a gimballing system - allowing excellent manoeuvrability on tough terrain. We are currently developing the software to use cameras and AI to detect the rover’s surroundings and autonomously return the rover to a starting location.
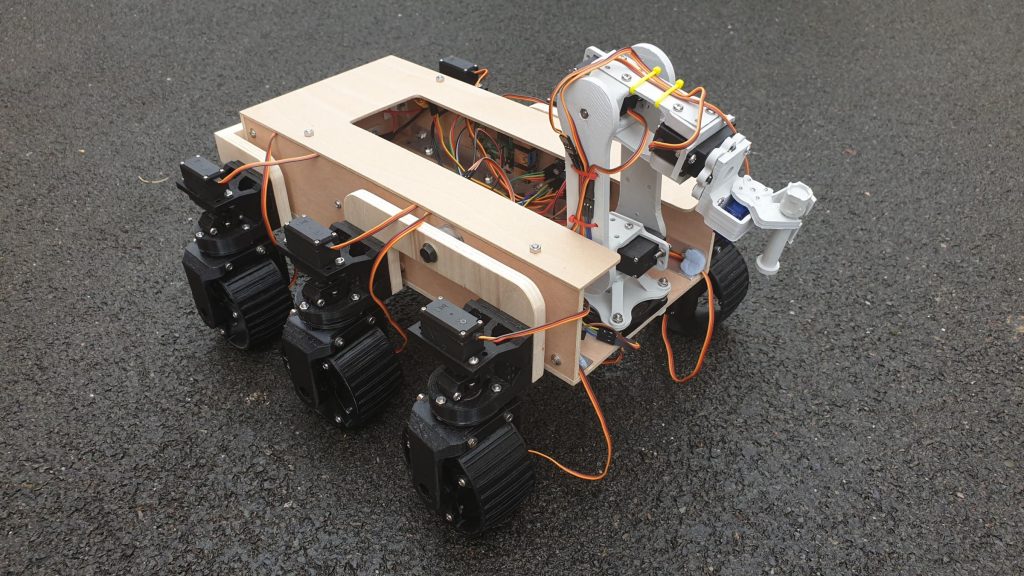
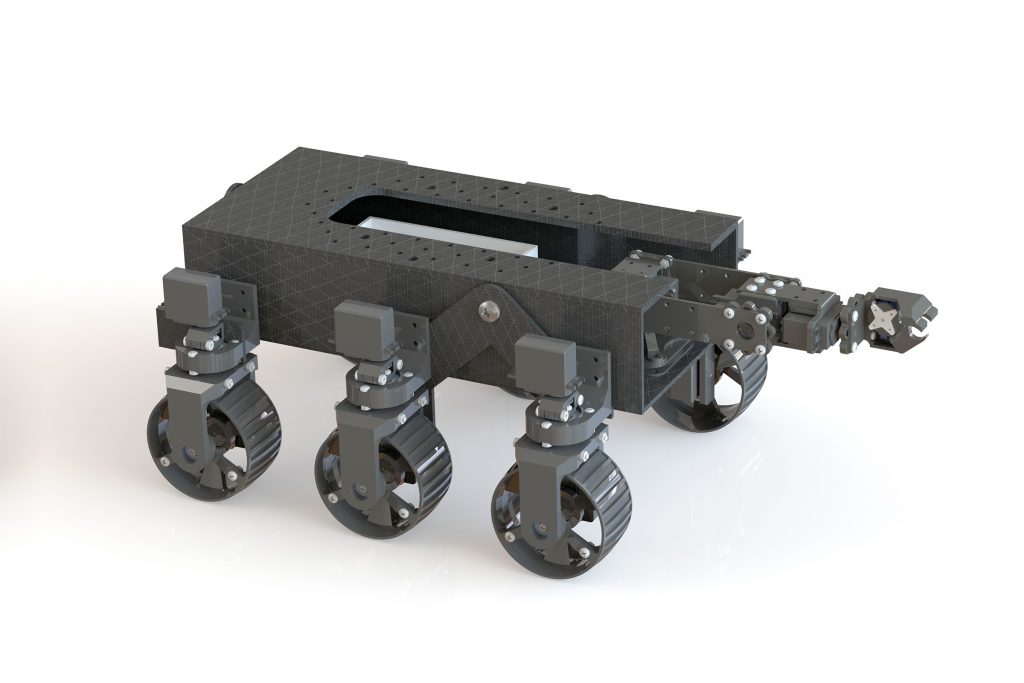
Photograph of Phobos 2020 physical prototype
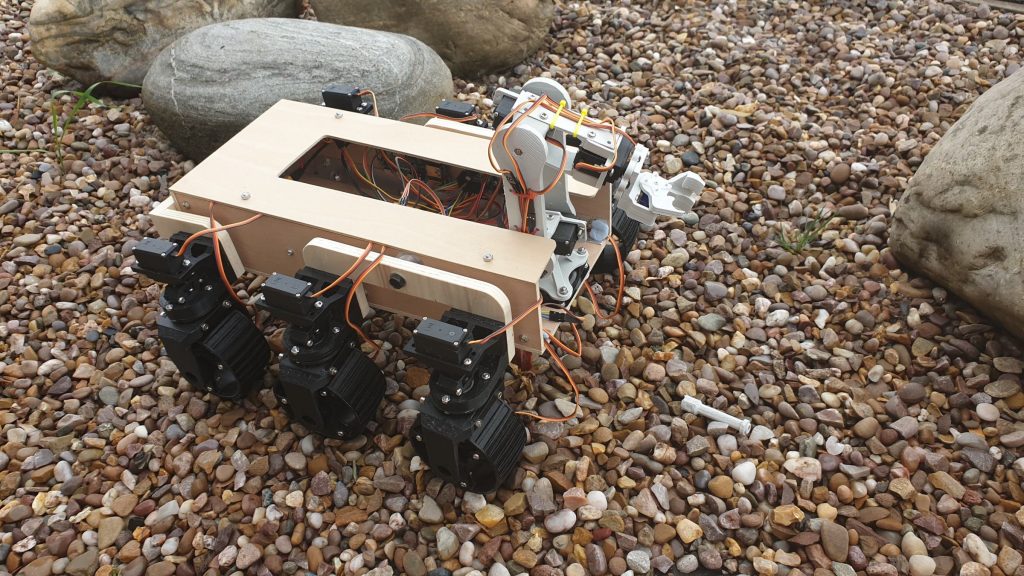
Rover exploring rough terrain
Demonstration of rough terrain traversing capabilities
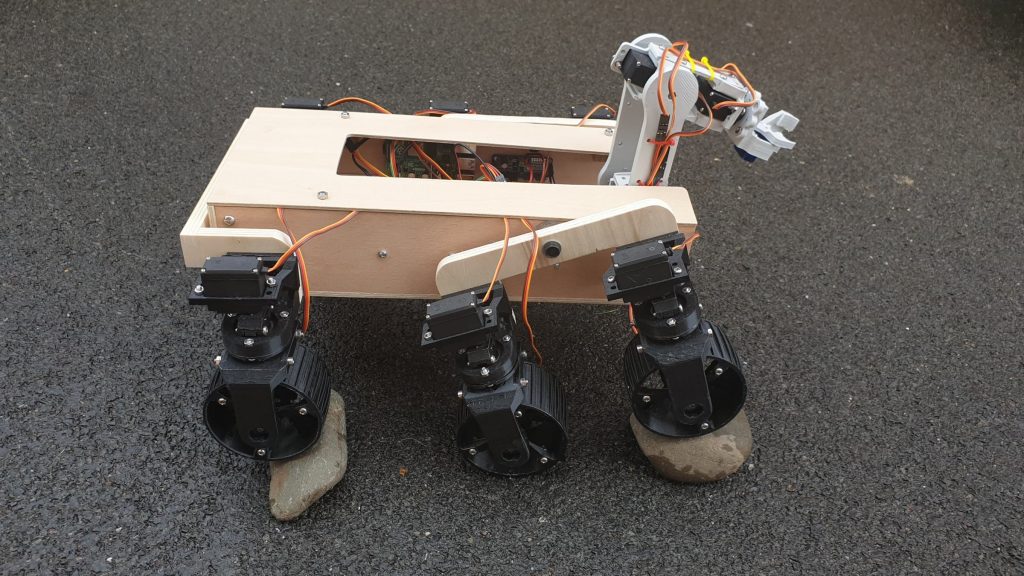
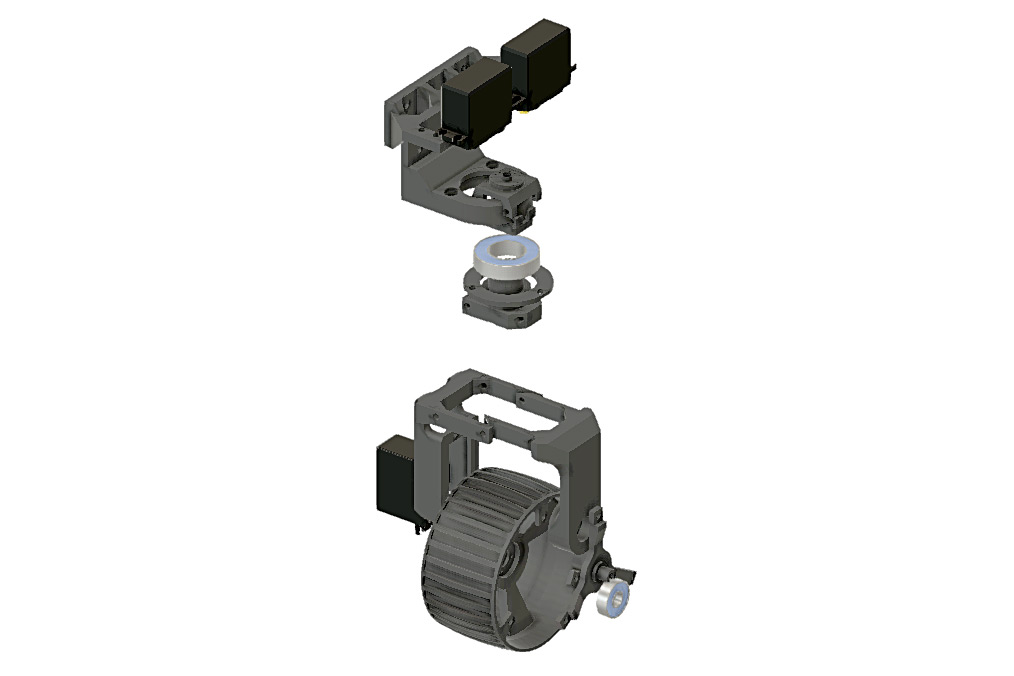
Demonstration of wheel gimballing system
3D-printed locomotion and arm subsystem
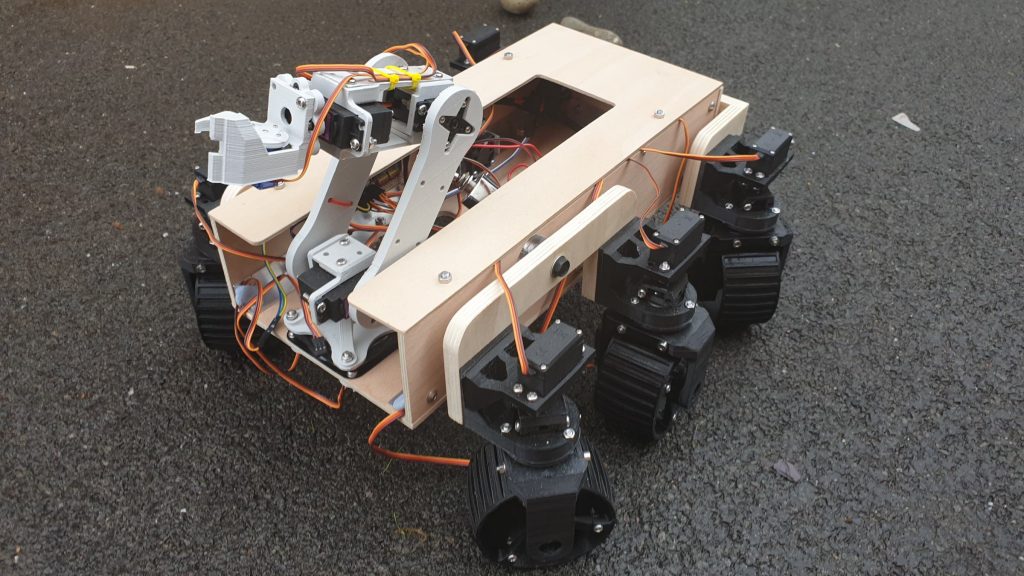
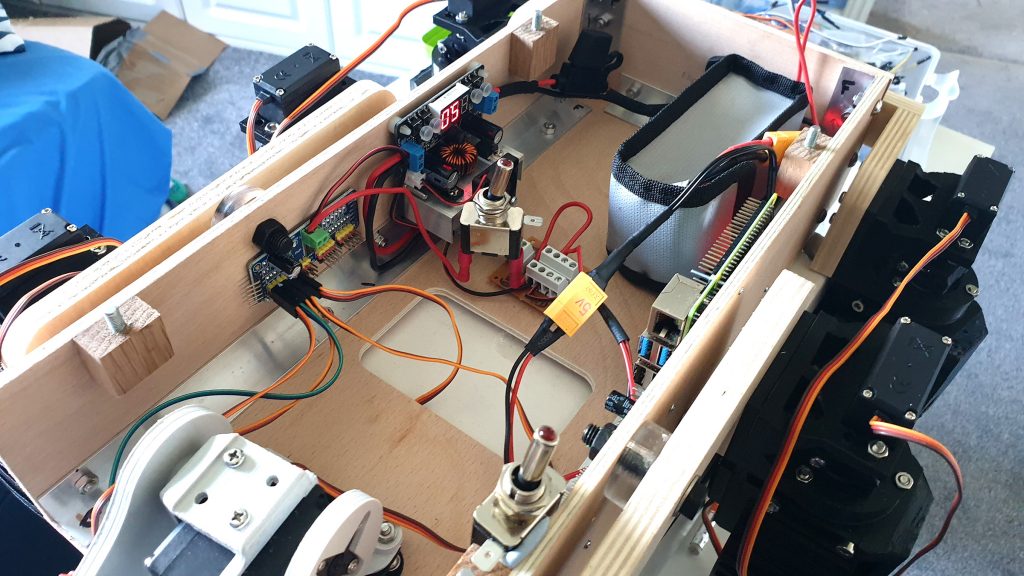
Internal view of the rover chassis, showing electronics
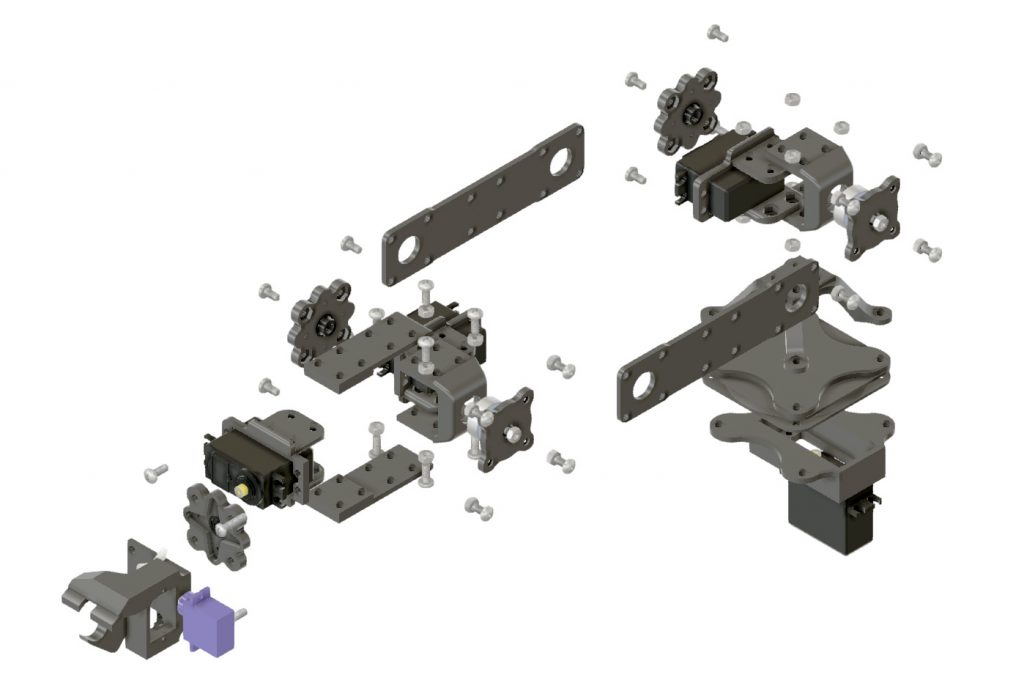
CAD rendering of rover arm assemblyExploded view of rover arm assemblyExploded view of rover wheel assemblyRendered side view of Phobos 2020Rendered front view of Phobos 2020CAD rendering of rover wheel assembly