
The aim of this project was to design, build, and test an amphibious Unmanned Aerial Vehicle (UAV) with support from the University of Southampton. The UAV was designed to take-off, land and manoeuvre on water as well as fly like a conventional fixed wing UAV. The team was split into a number of design teams to work on Structure, Aerodynamics, Hydrodynamics, and Stability, allowing team members to become specialised in their assigned areas. As the project progressed these design teams worked closely together to create an effective design.
A number of design iterations were conceived, and the design process was guided through the use of Computer Aided Design (CAD), Computational Fluid Dynamics (CFD), Finite Element Analysis (FEA) as well as practical testing, such as the wind tunnel test and the towing tank test. A combination of manufacturing methods were utilised, making use of both internally and externally sourced parts, from 3D printing to laser cutting.
The culmination of the design process was the Flight testing which was conducted in conjunction with the University of Southampton and Mr. Paul Heckles at Draycot Aerodrome over two days.
The design is highly adaptable as floats can be interchanged with wheel to create a conventional fixed wing UAV and the highly manoeuvrable centre of gravity allows for a range of payloads and avionics to be accommodated.
A number of design iterations were conceived, and the design process was guided through the use of Computer Aided Design (CAD), Computational Fluid Dynamics (CFD), Finite Element Analysis (FEA) as well as practical testing, such as the wind tunnel test and the towing tank test. A combination of manufacturing methods were utilised, making use of both internally and externally sourced parts, from 3D printing to laser cutting.
The culmination of the design process was the Flight testing which was conducted in conjunction with the University of Southampton and Mr. Paul Heckles at Draycot Aerodrome over two days.
The design is highly adaptable as floats can be interchanged with wheel to create a conventional fixed wing UAV and the highly manoeuvrable centre of gravity allows for a range of payloads and avionics to be accommodated.



-
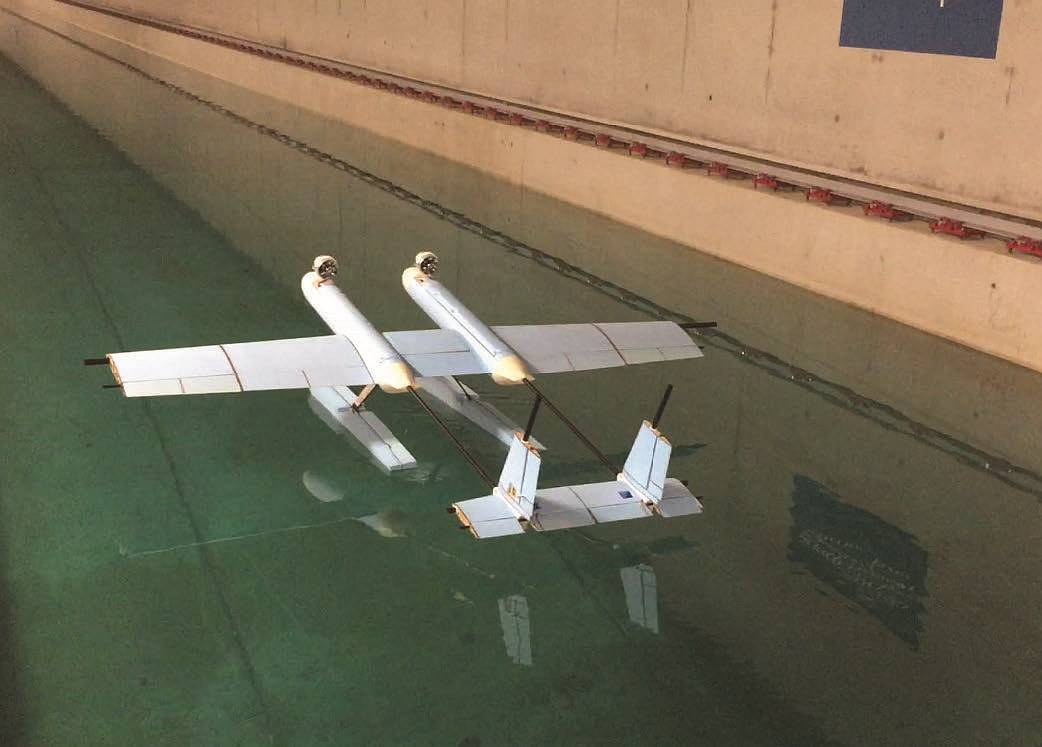
- Testing the UAV in the Towing Tank