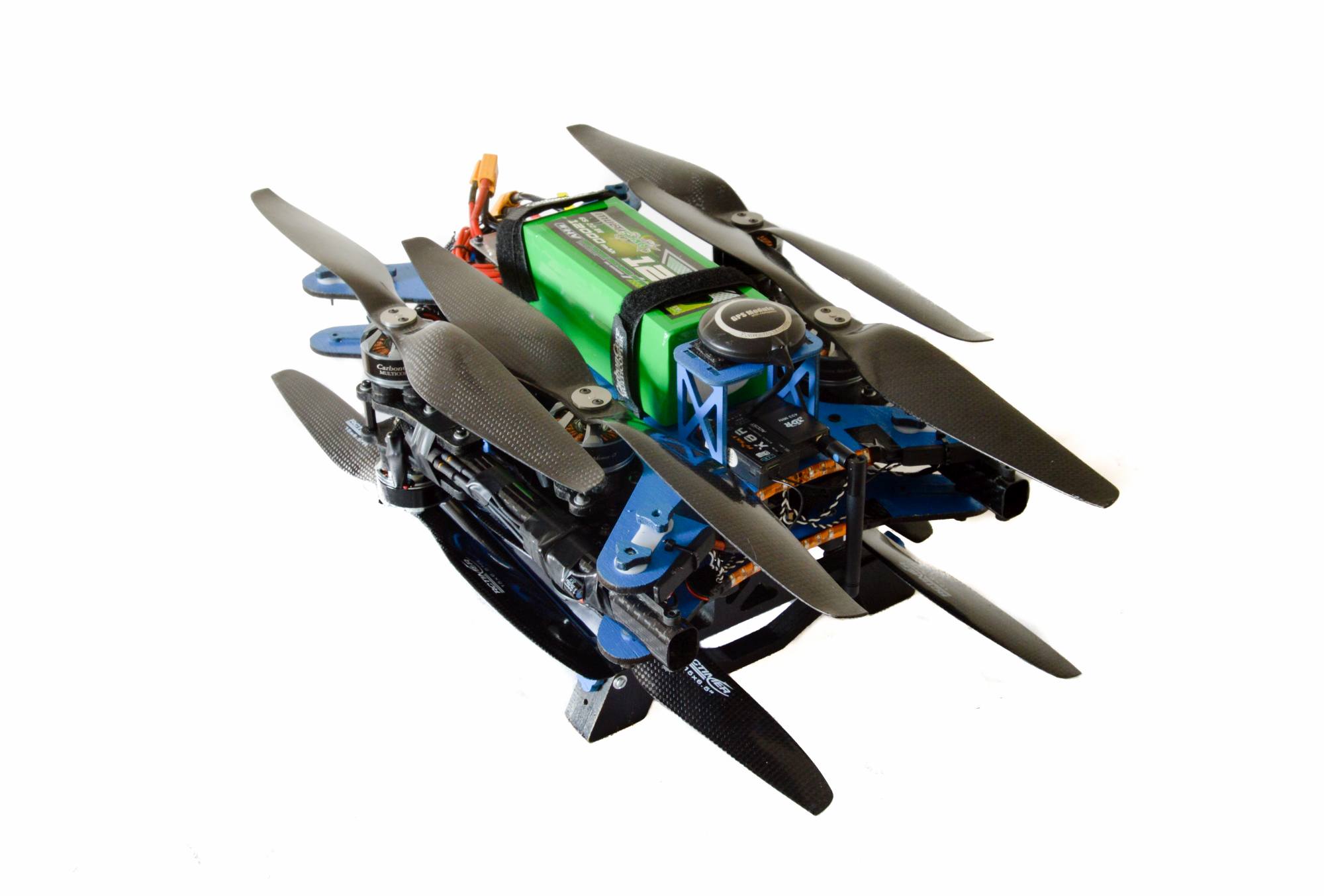
This UAV platform, known as the Gryphon UAV, is designed to compete in the IMechE UAS Challenge, an inter-university design competition. To complete the autonomous payload delivery task, a coaxial multirotor was designed. This design has a variety of advantages: heavy lift (7 kg payload in tests), reliability (continues mission in case of rotor loss), simplicity (each component can be easily replaced), modularity (easily changed payload bay), compactness (folding design), and accuracy of payload delivery (on board targeting system).
The Gryphon UAV has a take-off mass of 6.2 kg, including the standard 2 kg payload and the 12 Ah, 22.2 V battery. This configuration is optimised for a cruise speed of 10 m/s (22 mph) and a flight time of over 15 minutes.
In flight, the autopilot uses MavLink to communicate to a ground control station computer, relaying critical flight telemetry. The on board targeting computer, using the Rasberry Pi board, has the ability to guide the UAV as it approaches the drop location, as well as identifying the type of target from an alpha-numeric code on the ground.
The system has undergone a variety of design revisions. A Mk. 1 design was initially built and used to test the flying capabilities and configurations. This provided a chance to mitigate the difficulties of a coaxial design, such as the greater number of components and aerodynamic interference between coaxial rotors.
The Mk II design implemented design changes to the platform from the Mk I testing as well as a variety of new capabilities. Autonomous flight and payload delivery were implemented and tested in real world conditions. The inclusion of the targeting computer added target recognition capabilities during payload delivery.
To date, the Gryphon UAV has flown fully autonomous sorties, involving taking off, waypoint following, payload delivery and landing. The Mk III UAV will provide improvements from the Mk II in terms of performance and capability, as well as reliability, and is the platform to be used at the IMechE UAS Challenge fly-off in Jul 2016.
The Gryphon UAV has a take-off mass of 6.2 kg, including the standard 2 kg payload and the 12 Ah, 22.2 V battery. This configuration is optimised for a cruise speed of 10 m/s (22 mph) and a flight time of over 15 minutes.
In flight, the autopilot uses MavLink to communicate to a ground control station computer, relaying critical flight telemetry. The on board targeting computer, using the Rasberry Pi board, has the ability to guide the UAV as it approaches the drop location, as well as identifying the type of target from an alpha-numeric code on the ground.
The system has undergone a variety of design revisions. A Mk. 1 design was initially built and used to test the flying capabilities and configurations. This provided a chance to mitigate the difficulties of a coaxial design, such as the greater number of components and aerodynamic interference between coaxial rotors.
The Mk II design implemented design changes to the platform from the Mk I testing as well as a variety of new capabilities. Autonomous flight and payload delivery were implemented and tested in real world conditions. The inclusion of the targeting computer added target recognition capabilities during payload delivery.
To date, the Gryphon UAV has flown fully autonomous sorties, involving taking off, waypoint following, payload delivery and landing. The Mk III UAV will provide improvements from the Mk II in terms of performance and capability, as well as reliability, and is the platform to be used at the IMechE UAS Challenge fly-off in Jul 2016.
-

- Rear profile view of Gryphon UAV
-
- Rear view showing folded Gryphon UAV
-

- Rear view of Gryphon UAV showing the aft electronics
-

- Side view of Gryphon UAV with empty payload delivery system clearly visible
-

- Side view of Gryphon UAV
-

- Gryphon Mk. 1 during initial flight tests
-

- Gryphon Mk. 1 during initial flight tests
-
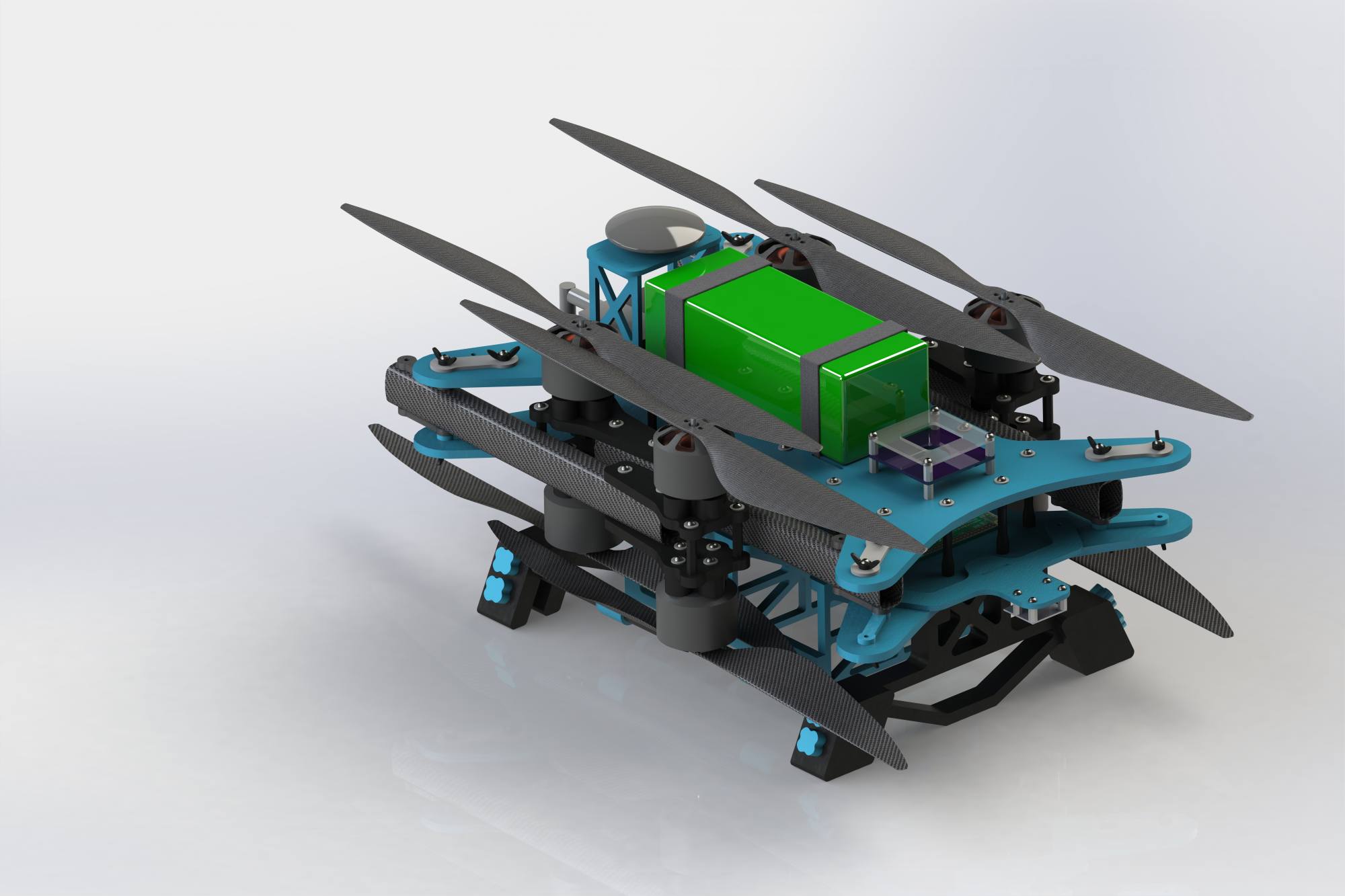
- Renderings of CAD models used in the design of the Gryphon UAV
-

- Renderings of CAD models used in the design of the Gryphon UAV
-

- Renderings of CAD models used in the design of the Gryphon UAV
-

- Renderings of CAD models used in the design of the Gryphon UAV
-

- Front view of Gryphon UAV with arms extended showing power distribution system on top body plate